research and development
Swarm Localization and Control

Satellite Swarm Localization And Control Via Random Finite Set Statistics
Project Description
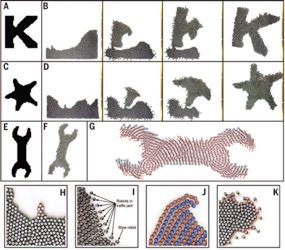
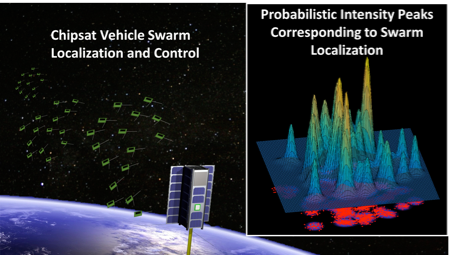
ASTER Labs, Inc has partnered with Professor Linares and Professor Seiler of the University of Minnesota to develop this innovative technology. It demonstrates a new approach to perform real-time relative vehicle localization within a swarm formation with application to communication-less coordination. Each vehicle estimates its location in the formation by tracking the vehicles around it. The algorithms make it possible to localize indistinguishable vehicles within a formation, without communication, using a probabilistic modeling of the swarm to account for low measurement accuracy, and uses probabilistic models for control. All of this is achieved by using Random Finite Sets statistics theory to solve the problem of multiple object tracking.
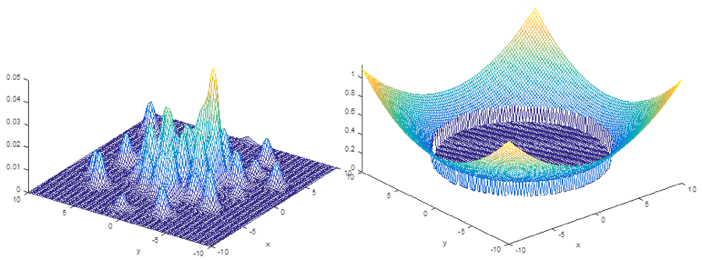
Estimation and control algorithms that can utilize simple measurements range and bearing angle to other units, and also determine the local environment using feature measurements have been integrated into the end result of this new technology. The final algorithms include a Hypothesis Density Filter and Sequential Monte Carlo Hypothesis Density Filter, Motion Model, Estimation techniques, Landmark SLAM using these techniques, Behavioral Distribution Control, Cyclic Distribution Control, and multiple decision making estimation models.
Societal Benefits
The ability to control the movement and track the location of a group of objects provides a significant advantage. Whether it be used to track and control a group of aircraft drones as they survey a crop, to alleviate the infamous congestion of rush hour by coordinating movement of cars and trucks, or to accurately direct nanobots as they work together during an otherwise complicated surgery, this technology offers a new approach to challenges across many diverse fields. In the field of aerospace especially, this innovation allows for better mission precision and reduced risk. Safety is increased for the same price of better mission results in both Earth environments and space.
Broader Impacts
NASA applications consist of enabling autonomous precision swarm coordination for satellites traveling in Earth orbit or eventually into deep space, including greater precision for vehicle control. The swarm formation coordination and control algorithms and software will provide expanded mission planning and analysis capabilities, reduction of communication requirements, and reduction of mission risk. The system would offer significant value in providing or augmenting current navigation and control technologies and techniques, as well as reduce support costs and system station-keeping down-time. The system can also offer precise formation control for assisting multiple spacecraft formation flying anywhere in the solar system. The proposed system data product has potential to enable benefits to autonomous planetary rover swarms, asteroid and comet exploration, and earth orbiting swarms.
Non-NASA applications for this technology include increased coordination and control for units of multiple unmanned aerial systems performing search and rescue operations, for the Department of Homeland Security and other government agencies or local municipalities. Robotic or autonomous land, sea, and air vehicle coordination for the Department of Defense, and reduction of communication and relay requirements is an added application. Commercial telecommunication satellite providers that desire to transmit large data rate information between multiple vehicles, such as imaging or internet-like inter-satellite networks, could realize the formation control benefits through this enabling technology.
National Aeronautics and Space Administration Project Description
Contact

About Us | Affiliations | Patents | Press | Kidspace | Employment | Privacy | Contact
© 2005-2016, ASTER Labs, Inc. All rights reserved.






